
随着具身智能技术的快速发展,人形机器人对结构轻量化、负载稳定性、运动耐久性的要求持续提升。传统金属材料自重较大、适配柔性运动能力有限,难以兼顾机器人高动态作业、长续航、高越障的核心需求。高性能高分子复合材料凭借低密度、高比强度、易成型、可仿生设计等优势,已成为人形机器人骨骼结构、关节传动部件的核心选材。
人形机器人骨骼的高动态负载特性,对承重材料的比强度、比模量及疲劳耐久性均提出了高要求,纤维增强高分子复合材料,特别是以工程高分子或特种工程高分子为基体的纤维增强材料,为人形机器人骨骼结构的轻量化与高动态负载能力提供了重要途径。该材料体系常以聚醚醚酮(PEEK)、聚苯硫醚(PPS)、尼龙等基体为连续相,以碳纤维、玻璃纤维等为增强相,通过二者协同作用,使材料在保持金属级强度的同时,大幅降低密度,目前,波士顿动力Atlas、本田ASIMO、特斯拉Optimus、宇树科技Walker等人形机器人在其躯干主承力框架、肩部或腿部等承重部件中已逐步采用碳纤维增强高分子复合材料。
复合材料在人形机器人轻量化中的应用
纤维改性工艺优化可显著提升复合材料的承载性能。相较于传统粉末、短切纤维改性PEEK材料,连续碳纤维增强CF/PEEK复合材料的强化效果尤为突出。Wang等采用连续CF/PEEK替代传统CF粉状或短切纤维改性的PEEK复合材料,使强度和模量提高了2倍以上,当纤维体积含量为70%时,弯曲强度达950MPa,弯曲模量达74GPa,适用于承受高负载、复杂曲率的承力部件。
仿生多级微观结构设计与3D打印一体化成型技术的结合,进一步实现了骨骼结构轻量化与力学性能的协同升级。E1asswad等采用3D打印技术,通过CF增强热塑性树脂蒙皮结合聚酰胺芯层设计成夹芯结构,构建了可变柔性脚,该结构不仅通过优化夹芯厚度比与一体化成型实现减重,还采用材料分区域功能布局,使整体弯曲强度提高3倍。Abdellatif等采用玻璃纤维增强聚酰胺通过3D打印一体化在其内部构筑复杂液压流道,并以CF/环氧树脂复合材料作为外部增强层,得到双层复合结构,该设计实现液压流道与结构承压功能一体化,在保持承重15MPa的同时,将部件重量降低了60%。
关节与传动系统是人形机器人实现灵活运动的核心部件,长期处于高速往复、高负载摩擦工况,极易出现磨损、疲劳、摩擦生热等问题,因此关节材料需兼顾轻量化、高耐磨、抗疲劳与自适应刚度调节特性。
Yu等采用熔融沉积成型(FDM)工艺制备了聚四氟乙烯(PTFE)/PEEK复合多孔轴承自润滑材料。该材料依托PTFE相赋予的固体自润滑特性,有效降低摩擦磨损;同时独特的多孔结构可实现储油润滑、结构减重与辅助散热的多重功效。研究通过优化喷嘴温度、喷嘴直径等工艺参数,确定了适宜的工艺窗口,最终制备的复合材料拉伸强度可达60~80MPa。
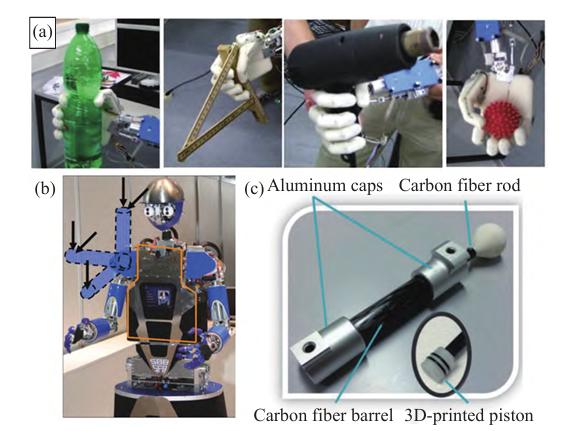
Hao等设计了一款适用于柔性机械臂的紧凑型低惯性关节结构。该关节以3D打印刚性光固化树脂作为支撑骨架,以编织钢缆作为传动肌腱,外部包覆嵌入光纤光栅传感器的预拉伸硅胶护套。其具备无需润滑的两自由度运动能力,可通过调节钢缆肌腱的预紧力实现整体刚度的主动调控。测试表明,该关节在承载数倍于自身重量的工况下,仍可保持良好的运动顺应性与抗干扰性能。
相信未来,随着材料改性工艺、3D一体化成型、智能刚度调控技术的持续升级,高分子材料将进一步实现结构承载、耐磨传动、智能自适应的多功能集成,推动人形机器人向轻量化、高动态、长寿命、高适配的产业化方向发展。
来源:
熊健.复合材料在人形机器人中的应用进展与趋势
朱桂英.人形机器人用高分子材料研究进展
关注我们
 扫描二维码关注微信
扫描二维码关注微信


 手机站
手机站
