
中国粉体网 摆线针轮减速器作为RV减速器的核心类型,凭借独特的传动原理与优异性能,成为高端装备与精密制造领域的关键传动部件。它以输入机构、摆线轮、针轮、输出机构为核心架构,通过摆线轮与针齿的精密啮合实现高效减速,兼具大传动比、高刚性与强承载能力,在工业、机器人、航空航天等领域应用广泛。
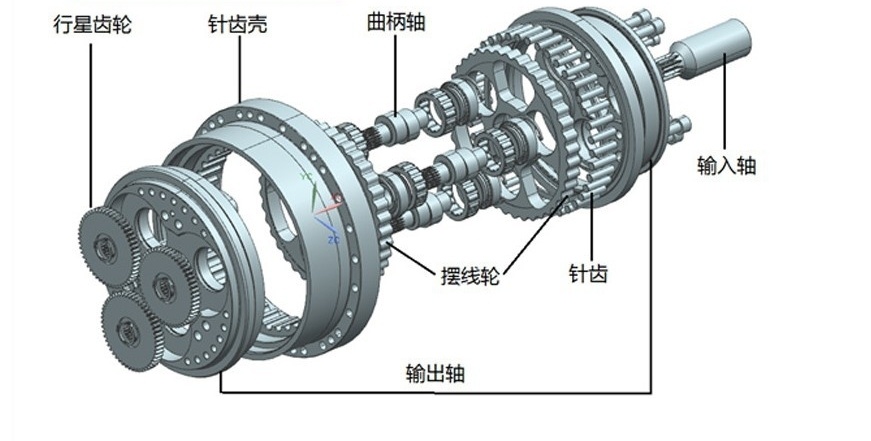
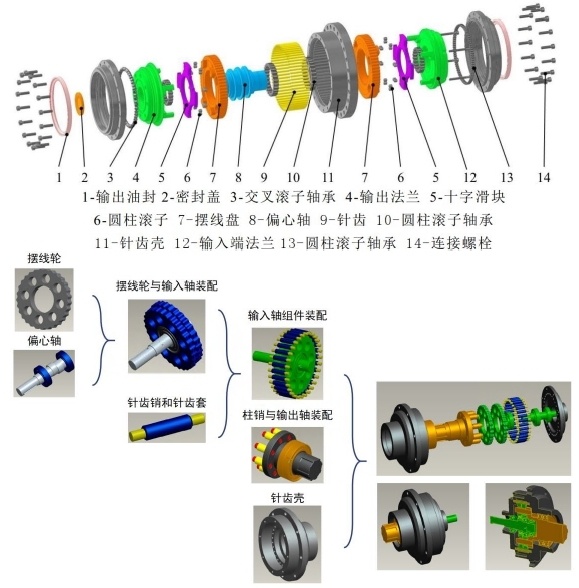
输入轴:连接输入端。包括输入轴、偏心轴、偏心套等,轴上通常有两个相位相差180度的偏心结构,带动摆线轮做偏心运动。
摆线轮:齿形为摆线曲线的齿轮,套在偏心轴的偏心套上
针轮:内壁分布着若干针齿销;
输出机构:包括输出轴、柱销孔等,摆线轮上的柱销孔推动着输出柱销转动,柱销连着减速器的端盘作为输出机构。
来源:《高强度紧凑型精密摆线针轮减速器研究》(郝哲鹏)
其减速原理基于“偏心公转+反向自转”的少齿差传动机制。电机驱动输入轴旋转,带动偏心轴使摆线轮偏心旋转(绕轴中心公转并同时自转)。公转过程中摆线轮与针齿啮合,因两者齿数差为1,针齿的反作用力迫使摆线轮反向自转一个齿距,即输入轴旋转一周,摆线轮自转"针轮齿数分之一周",从而达到减速效果传动至输出机构。摆线针轮减速器的传动比范围大,单级传动比可达87。
凭借独特结构与精密工艺,摆线针轮减速器具备多重核心优势:传动比范围广、结构紧凑,输入输出轴同轴设计大幅缩小体积;刚性好、承载能力强,多齿啮合特性使其抗冲击性能优异;传动效率超90%,运转平稳、噪音低,使用寿命远超传统减速器。
这些优势让其适配两大核心场景:一是重工业领域,在冶金机械、起重设备、工程机械中,凭借高负载与抗冲击能力保障稳定运行;二是精密传动领域,在航空航天、机器人、数控机床、医疗器械中,满足高刚性、低噪音、高精度的严苛要求。
摆线针轮减速器的高性能背后,是齿廓设计与精密制造的双重挑战。齿廓设计层面,其齿廓为针轮齿圈的共轭外摆线曲线,需通过复杂啮合方程计算参数,且必须搭配齿廓修形技术,修形量过小易引发啮合干涉,过大则导致传动回差增大、精度下降,对设计精度要求极高。核心零件摆线轮、针齿销多采用GCr15轴承钢,需经精密热处理提升硬度与耐磨性;加工需高精度磨床,零件公差需控制在微米级,设备投入与工艺成本居高不下,成为行业规模化生产的关键门槛。
在人形机器人领域,摆线针轮减速器已实现部分应用。其高负载、高精度、轻量化特性,完美适配机器人下肢关节、腰髋等部位需求。动易科技PhyArc系列摆线关节模组定位精度达±0.01mm,满足精密装配要求;智同科技CT-CHR系列则广泛应用于仿生机器人、外骨骼与医疗康复设备,推动机器人传动技术升级。

PhyArc系列摆线关节模组 来源:动易科技
目前关节模组的主流方案仍以行星减速器和谐波减速器为主。行星减速器结构紧凑、承载能力强,但存在背隙较大、定位精度不足的问题,在冲击工况下精度衰减明显,会增加控制系统的控制难度。谐波减速器则能以极轻的重量实现高减速比,运动平顺且无回差,不过其柔轮强度有限,抗冲击性能较差,在高频冲击场景下易出现疲劳断裂,整体寿命与可靠性有待提升。
摆线针轮减速器齿轮啮合的构造使得其较行星精度更高、较谐波同体积扭矩输出能力更强、较传统RV体积重量更小;但价格、体积/重量较谐波和行星略高。
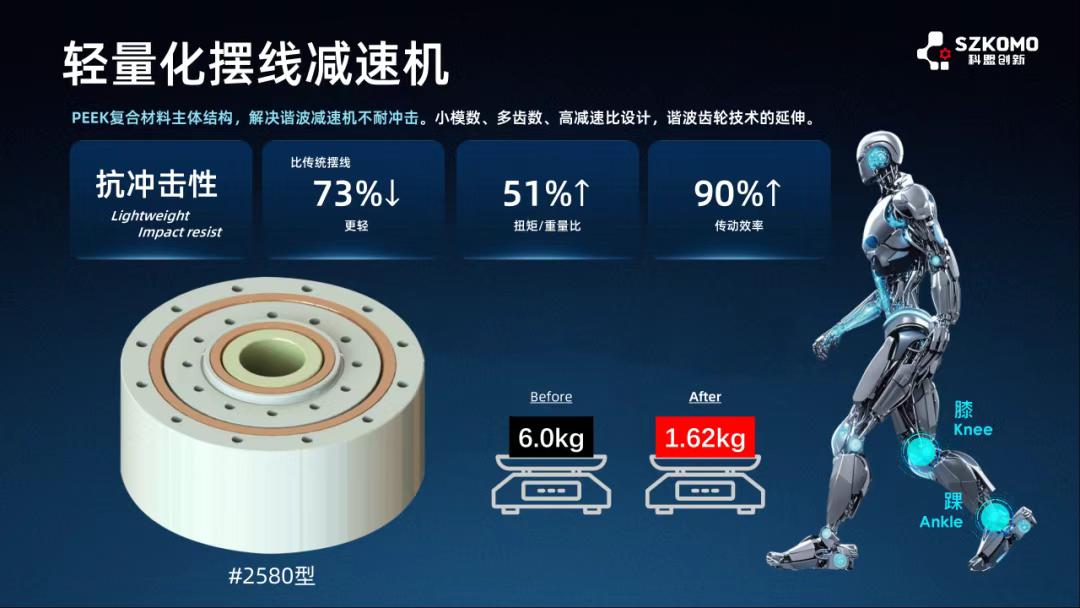
摆线针轮在大幅度提升人形机器人关节扭矩的情况下,成本和体积/重量增幅可保持在可控范围内,且当前采用PEEK等轻量化材料打造的摆线针轮减速器可大幅降低自重。综合来看,摆线针轮有望在人形肩部、腰部、下肢髋关节等大关节部位实现应用。
来源:
各企业官网
关注我们
 扫描二维码关注微信
扫描二维码关注微信


 手机站
手机站
