
中国粉体网讯 直线关节是一种常用于工程和机械设计中的机械关节,可沿着一个直线方向运动。液压缸、气压缸、直线电动机、电动缸(一体化机电作动器)等装置可通过齿轮、行星滚柱(滚珠)丝杠等传动部件输出直线运动。
相较于旋转关节,直线关节可显著节省安装空间、简化机器人整体设计,在人形机器人中具备独特优势。目前,直线关节的驱动形式主要有液压驱动、电动驱动和气动驱动三大类。
液压驱动是通过液体压力实现机械运动,其核心组件包括液压泵、液压缸、控制阀组、油箱和管路。液压泵提供高压油液,控制阀组精确调节油液方向、压力和流量。
在机器人直线关节中,液压驱动凭借高功率密度优势,已有很多应用。例如2013年,LEE等设计了一款由微型液压压缩机转换器组成的微型电动静液作动器,并构建了由新型液压直线执行器驱动的6自由度仿生机械臂,整体质量仅2.2kg,可举起5kg以上物体。该系统通过液压缸的线性伸缩运动直接驱动关节,采用直流电动机驱动圆柱凸轮机构,将旋转运动转换为活塞的直线运动,从而压缩工作流体,产生推力。
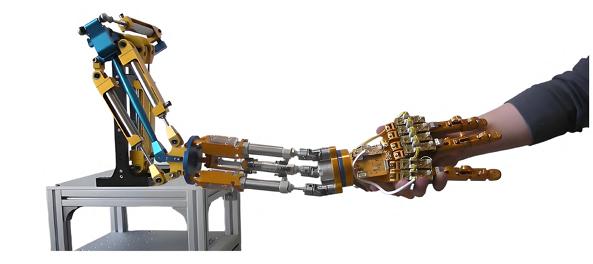
液压驱动仿生机械臂
日本川崎公司开发的人形机器人Kaleido配备了EHA系统来驱动其腿部关节,将伺服电机、液压缸与液压泵集成形成一体化驱动单元,具备功率密度及抗冲击、耐磨损性能,可提供高达6000N的最大输出负荷与200mm/s的运动速度,确保机器人在复杂环境下的高效运动。
电动驱动以电力为动力源,在直线关节的电驱动系统中,电动机通过输出机械力矩驱动负载旋转,并借助丝杠、齿轮齿条或线性模组等传动机构,将旋转运动精确转换为直线运动。相较于液压驱动,电动驱动系统能量转换效率更高、维护需求更低、结构更简洁,是当前人形机器人直线关节的主流驱动形式。
随着技术的发展,行星滚柱丝杠(PRSM)凭借其高负载、高精度等独特优势在工业领域得到广泛应用。特别是可与无框电动机集成设计的反向式行星滚柱丝杠(IPRSM),可满足机器人关节对小型化和轻量化的需求。
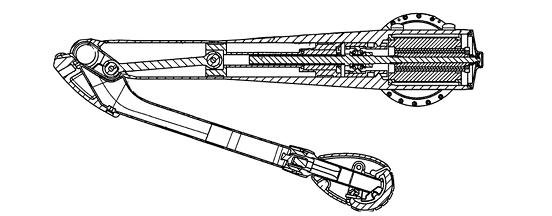
Atlas腿部关节构型
例如,特斯拉人形机器人Optimus多处采用PRSM作为直线关节核心部件,大臂、小臂、大腿、小腿均配备相应直线驱动关节;波士顿动力Atlas机器人,将电动机布置于髋关节附近,通过PRSM与连杆机构配合,将旋转运动转换为直线运动,实现小腿屈伸,适应复杂地形;开普勒机器人先行者K1、优必选Walker S,均采用直线电动机或推杆直线电动机驱动腿部直线关节,实现高灵活性与精确控制。
气动驱动利用压缩气体作为动力源,通过气缸或气动肌肉等元件将气压能转化为机械运动,从而驱动设备运动或做功。其核心组件包括空气压缩机、控制阀以及管路系统等。其核心优势在于高功率质量比、柔顺性和安全性,适合需要爆发力或人机交互的场景,例如,人形机器人的动态动作或康复外骨骼的辅助运动。相较于电动或液压驱动,气动系统具有结构简单、响应快、清洁无污染及过载保护等优势,但受限于空气可压缩性,其定位精度和输出稳定性较低。
如今的气动驱动大都是通过气动人工肌肉(PMA)来实现的。PMA是一种仿生驱动装置,通过压缩空气驱动,实现类似生物肌肉的收缩运动。其典型结构由内部橡胶气囊和外部高强度编织网套组成。当气压增加时,网套径向膨胀导致轴向缩短,产生高功率密度、柔顺的直线拉力。PMA具有质量轻、响应快、抗冲击性强等优势,被广泛应用于机器人柔性关节、康复外骨骼、仿生机械等领域。

气动人工肌肉
综上,人形机器人直线关节技术正从液压驱动向电动化转型,PRSM凭借低质量、高承载、高精度特性,在一体化直线伺服关节中占据重要地位;气动驱动则通过与电动技术结合,不断弥补自身不足。随着人形机器人向家用和大众市场拓展,直线关节将朝着轻量化、绿色环保、高度集成化方向持续发展,为机器人性能提升提供核心支撑。
参考来源:
李新宇.人形机器人驱动控制关键技术研究现状与展望
(中国粉体网编辑整理/月明)
注:图片非商业用途,存在侵权告知删除
关注我们
 扫描二维码关注微信
扫描二维码关注微信


 手机站
手机站
