
末端执行器是机器人与环境交互的最终执行部件,其性能直接决定机器人的工作能力、柔性和易用性。按照应用领域的不同,末端执行器主要分为工业机械手和人形机器人灵巧手两大类,二者在结构设计、性能参数及应用场景上存在显著差异,具体特点如下:
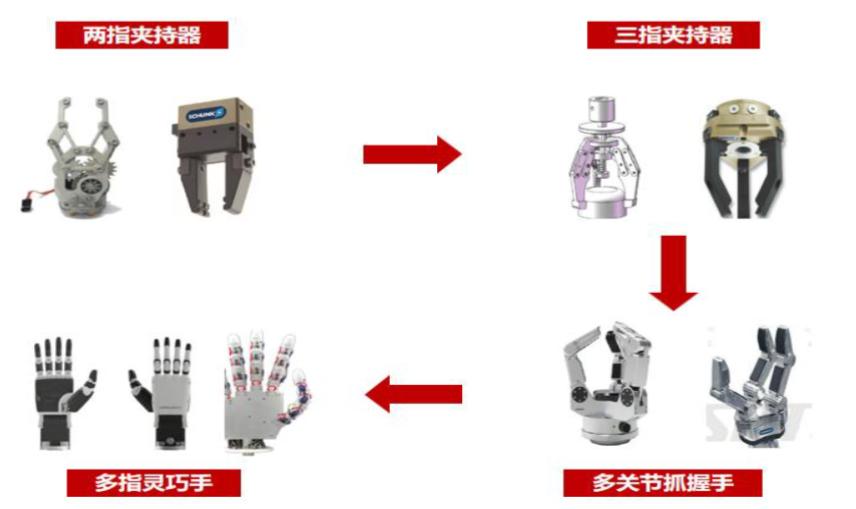
工业机械手:其结构设计简洁,控制边界清晰,但自由度存在局限,通常不超过6个自由度;且普遍缺乏传感器配置,难以实现精确的力控与位置控制,其中力控精度大于0.5N。此类执行器主要应用于专业化产线,承担重复化作业任务。从结构类型来看,工业机械手多为两指或三指夹持器,仅能完成部分指面抓取动作,灵活性较差,无法抓持复杂形状目标,也难以对目标物体实施精细化操作。
来源:《机器人多指灵巧手的研究现状、趋势与挑战》(蔡世波等)
人形机器人灵巧手:通过多关节仿生设计(主流产品具备12-22个自由度)与全域感知系统,有效突破了工业机械手的性能局限,可精准模拟人手动作,完成强力抓取、精准拿捏(力控精度可达0.01N)等复杂操作。其发展趋势为深度仿人化,以更好地适应类人工作环境。当前主流的人形机器人灵巧手分为多关节抓握手和多指灵巧手:其中多关节抓握手通常配备3-4个手指,且手指上设置多个被动关节,可执行部分依赖指面的抓取动作及强力抓取任务;多指灵巧手则多具备3个及以上手指和多个自由度,凭借多自由度手指结构,以及拇指额外的内/外旋运动功能,能够良好实现强力抓取、精准捏取、中间抓取等多种动作,从而实现与环境的高效交互。
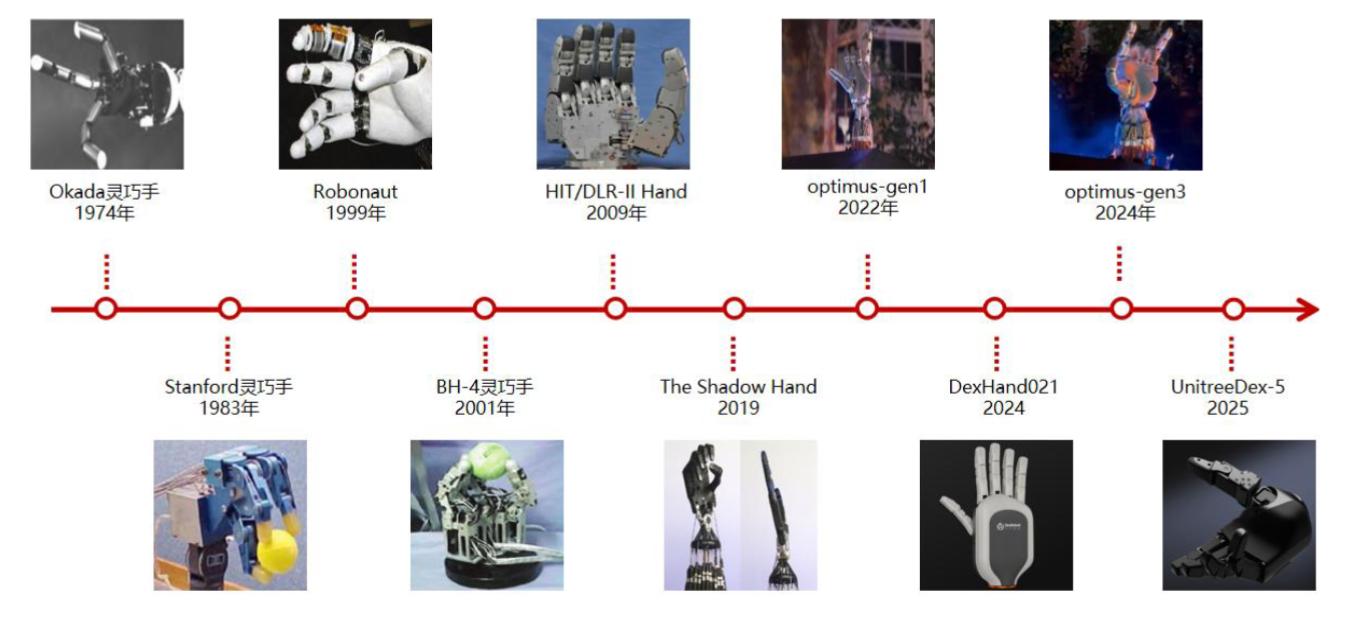
21世纪以来,灵巧手在集成化、灵活度与智能化水平上持续提升,国产灵巧手的研发也同步加速。其中具有代表性的成果包括:北京航空航天大学研制的BH系列灵巧手,以及哈尔滨工业大学与德国宇航中心联合研发的HIT/DLR-II Hand灵巧手。后者采用轻量化盘式电机驱动,结合谐波减速器与齿形皮带传动方案,整体结构紧凑、重量仅1.5千克。
来源:《机器人灵巧手研究综述》(刘伟等),国联民生证券研究所
近五年,灵巧手技术迭代速度显著加快。2022年,特斯拉推出Optimus系列灵巧手,凭借高度集成化设计快速成为行业标杆,并在此后持续迭代优化。与此同时,国内企业也纷纷布局,宇树科技、灵心巧手等先后推出自研灵巧手产品,推动国产方案不断成熟。
从参与者来看,灵巧手开发商主要分为研究机构与企业两大类型。行业发展早期,参与者以研究机构(主要为高校)为主;近年来,随着产业需求持续提升、行业规模化进程日益临近,越来越多企业纷纷投身于灵巧手的研发与生产中,成为行业发展的重要力量。
从研发时间与发展进程来看,海外灵巧手研究起步较早、参与主体数量众多,长期以来,海外企业及研究机构积累了深厚的技术能力,优势较为显著。相比之下,中国灵巧手行业起步较晚,直至2020年后才迎来行业小幅增长,但近5年来的发展速度已超过海外。随着国内产业需求的不断释放,中国灵巧手行业有望实现后来者居上,并在行业规模化发展进程中发挥重要作用。
从产品性能来看,灵巧手手指多采用仿人手设计,以5指产品为主流;不同产品的关节数量与自由度差异较大,其中单手关节数量及自由度主要集中在10-22个。近年来,随着技术不断迭代升级以及市场需求的日益丰富,灵巧手的关节数量与自由度整体呈现稳步提升的趋势。在驱动与传动方式上,目前行业内技术类型较为多样:驱动方式主要集中在电机驱动与腱驱动,其中电机驱动凭借其优势有望成为未来主流驱动方式;传动方式则以连杆、齿轮、滑轮及腱绳驱动为主,整体技术路线尚未形成统一标准,仍处于探索完善阶段。
展望未来,随着人形机器人本体量产加速,灵巧手预计迎来新一轮产品扩张期,海外特斯拉及国内宇树科技等人形机器人本体厂、国内灵心巧手等灵巧手企业有望引领行业发展。
参考来源:
刘伟.机器人灵巧手研究综述
蔡世波.机器人多指灵巧手的研究现状、趋势与挑战
国联民生证券《人形机器人系列报告五灵巧手:核心终端 机器人融入物理世界的接口》
关注我们
 扫描二维码关注微信
扫描二维码关注微信


 手机站
手机站
