
人形机器人作为前沿科技的集大成者,其高度仿生的运动能力与智能交互,源于一套精密协同的复杂系统。从硬件构成看,执行系统、感知系统、控制与计算系统是其三大核心支柱,共同支撑起机器人的自主运行与智能作业,决定着整机的性能上限与成本构成。
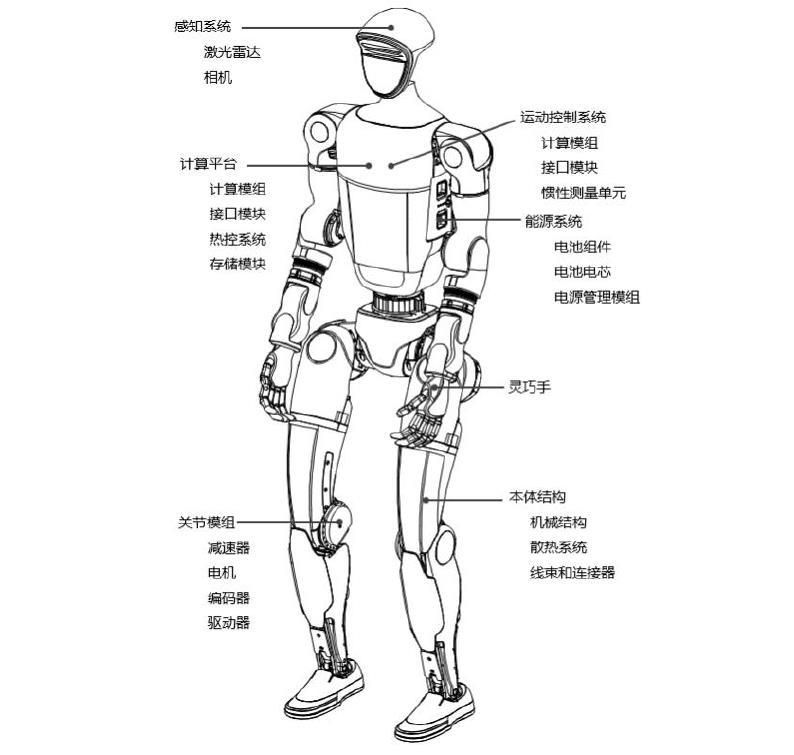
人形机器人物理结构及主要组件构成 来源:宇树科技
执行系统
执行系统是人形机器人的动力支撑,占整机成本40%-50%,是实现机械运动的核心。其本质是将电能高效转化为精准的机械动作,决定着人形机器人的运动精度、负载能力与灵活性。目前市场上的人形机器人通常具有40-50个自由度,以模拟人类肢体的丰富动作。执行系统的核心是关节模组,它高度集成了电机、减速器、编码器与制动器等部件,是驱动全身运动的基础单元。
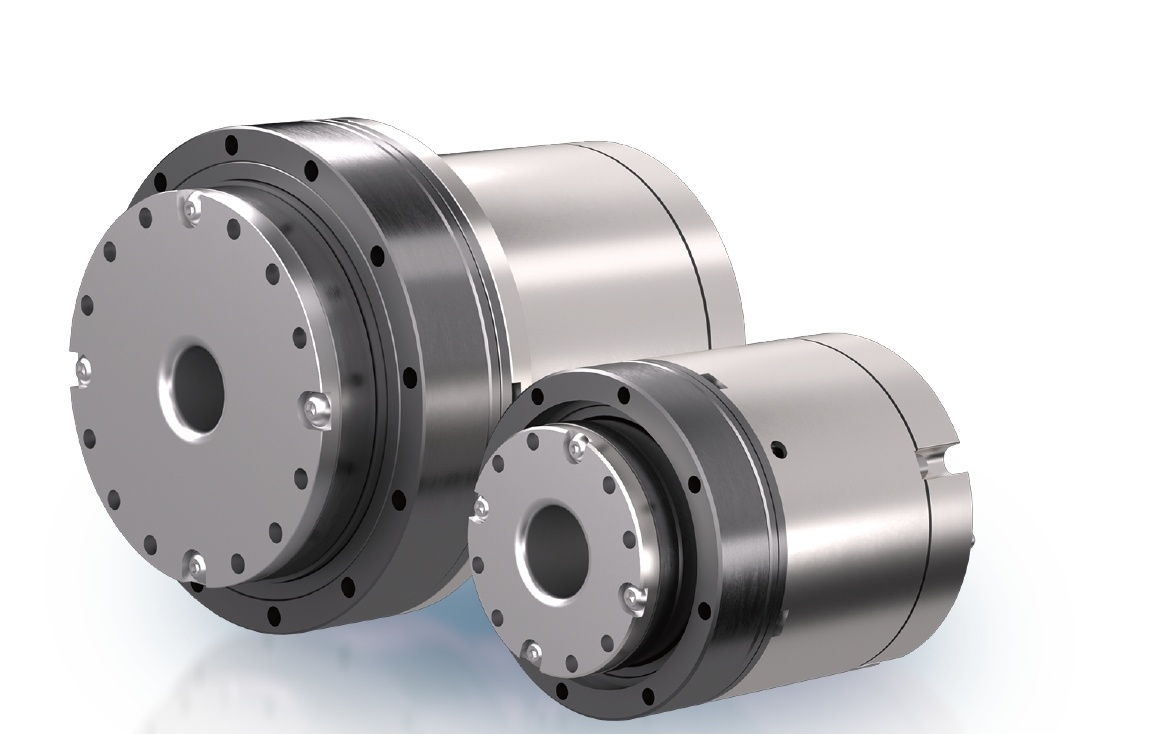
关节模组 来源:科盟机器人
减速器:主要分为三类,谐波减速器体积小、精度高,适配小臂、手腕等中小负载关节;RV减速器承载强、刚性好,用于腰部、腿部等大负载关节;行星滚柱丝杠则擅长将旋转运动转为直线运动,多用于腿部、手臂的推杆结构。
电机:人形机器人电机的选择主要包括无框力矩电机与空心杯电机,前者为躯干、四肢提供大扭矩,后者以小体积、快响应的优势,成为灵巧手驱动的理想选择。
感知系统
感知系统,负责构建对外部世界与自身状态的全面认知,是实现人机交互、环境适应的关键。该系统主要分为三大类传感器,协同采集多维信息。
视觉传感器:以RGB-D相机与激光雷达为主,承担环境识别、障碍物躲避与目标定位的功能。
力传感器:核心为六维力传感器和力矩传感器,安装在手腕和脚踝,感知三个方向的力和力矩,实现柔顺控制和平衡。
触觉传感器:覆盖机身的“电子皮肤”,能敏锐捕捉纹理、温度、压力分布,赋予机器人细腻的触感,实现对易碎、柔软物体的安全操作。
控制系统
控制系统作为人形机器人核心控制中枢,统筹感知信息处理、运动指令执行与智能算法运行。该系统由AI芯片、控制器、电池系统三大部件构成。
AI芯片是算力核心,承载复杂智能算法与海量数据处理,是机器人实现认知、决策的硬件基础。控制器则是实时运动控制的载体,负责协调全身部件协同运作,且必须适配VLA具身大模型,保障多模态指令到动作的精准转化。电池系统的核心诉求是高能量密度、高倍率放电与长续航,目前其成本占比不足整机1%,但主流机型续航仅1-2小时,仍是制约机器人长时间作业的短板。
除三大硬件系统外,软件算法是赋予机器人智能化、自主化的核心,占上游成本
的5%-10%,核心包括运动控制算法、具身智能算法、人机交互算法等,构成完整的软件生态。
从产业链看,执行系统的精密减速器、电机,感知系统的高端传感器,控制与计算系统的专用AI芯片,仍是技术壁垒与成本集中的核心环节。
参考来源:
宇树招股书
浦银国际《AI从数字网络走进物理世界——人形机器人是否会复刻新能源汽车发展路径?》
关注我们
 扫描二维码关注微信
扫描二维码关注微信


 手机站
手机站
