
近年来,人形机器人产业发展尤为迅速,传感器作为人形机器人核心零部件需求旺盛。以特斯拉人形机器人Optimus为例,全身共有28个关节执行器,搭载了14个拉压力传感器和14个扭矩传感器,此外还有4个六维力矩传感器搭载于手腕及脚踝,具备较高技术壁垒。
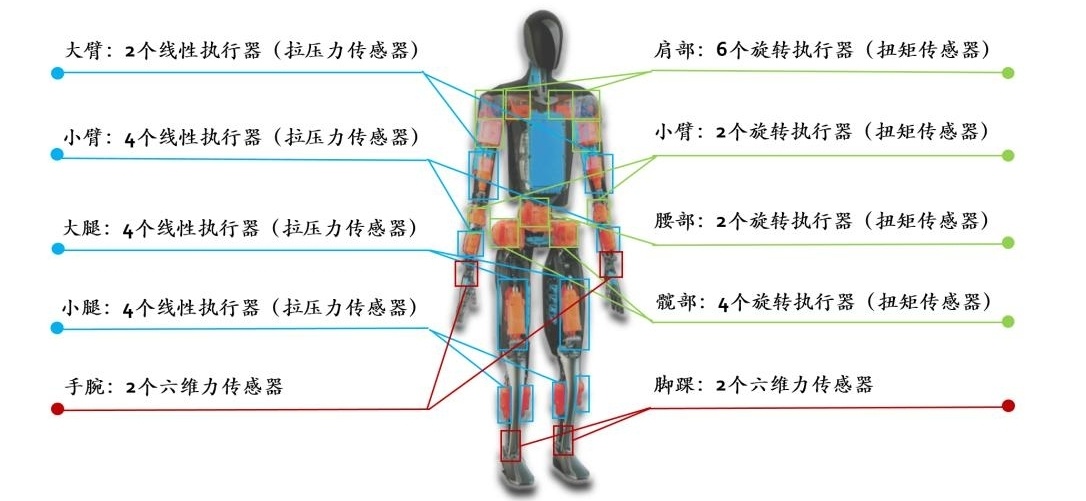
Optimus 全身可搭载力传感器情况 来源:华源证券研究所
简单来说,力传感器就是一种将力学信号转换为电信号的装置。机器人在执行运动控制过程中利用力传感器采集的信号作为反馈,设计控制策略主动控制作用力。

力传感器分类对比 来源:华源证券研究所
目前市面上的一维力传感器应用数量多,六维力传感器价格高,且存在较多技术壁垒。
壁垒一:结构设计与材料
首先,弹性体必须兼顾灵敏度高、刚性高与小型化的特点,其次是应变片会直接影响精度与可靠性,金属片有量产一致性差的缺陷,半导体片则存在前期投入高、成熟度低的劣势。
壁垒二:解耦算法
核心难点是非线性解耦,任一通道输出都会受其他方向力/力矩的非线性耦合干扰。
壁垒三:标定检测
六维力标定样本空间含53万+个样本点,难度呈指数级上升。
安培龙是国内领先传感器企业,目前公司已拥有热敏电阻及温度传感器、压力传感器、氧传感器、力传感器四大类产品线,广泛应用于汽车、家电、机器人等领域。
公司在人形机器人力传感器领域进行了大量的布局。
其在上海及深圳拥有两支研发团队,上海子公司引进了大量的结构设计、嵌入式硬件、软件算法、制造工艺等研发技术人员,并搭建力传感器试验线,深圳总部研发团队则在原有的基础上持续扩充,目前已具备较为丰富的力传感器产品品类,包括压式测力传感器、拉压力传感器、扭矩传感器、六维力传感器等。
在应变片领域,安培龙同时拥有金属应变片与MEMS硅基应变片+玻璃微熔两种技术路线。
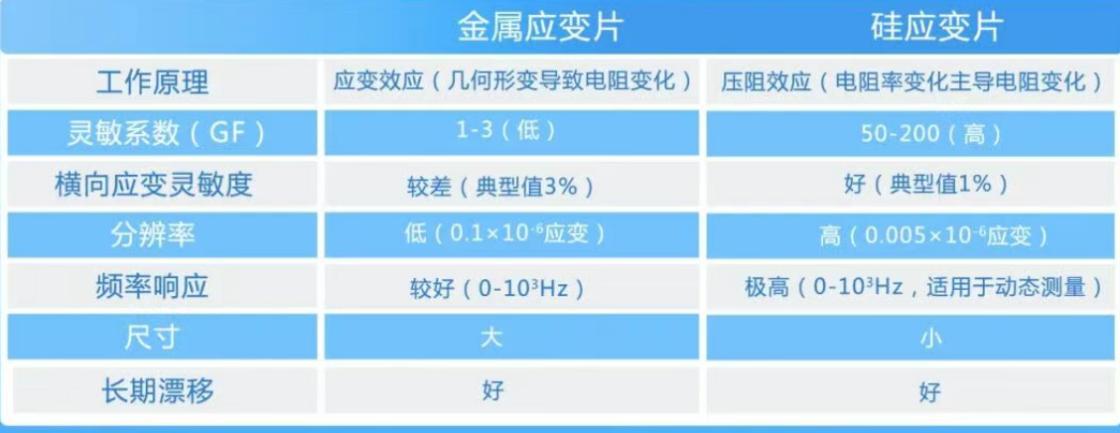
来源:安培龙
其中MEMS硅基应变片搭配玻璃微熔工艺相较传统方案优势较为明显,一方面基于半导体微纳加工技术制备,其制造工艺保障了传感器在批次间具有良好的一致性,具备灵敏度高、形变量小、阻抗大、功耗低等优势,适于机器人规模化部署;另一方面将MEMS硅基应变片与传感器弹性体通过高温熔融玻璃粉实现牢固结合,可以显著提升传感器在严苛工况下的长期稳定性与使用寿命。
过去,我们国家六维力/力矩传感器长期被欧美一些企业(ATI、Kistler等)垄断,在高端场景基本依赖进口,但可喜可贺的是,经过多年发展,国产六维力矩传感器已从“卡脖子”转变为“领跑”。目前,蓝点触控以及坤维科技等企业技术与成本优势显著,如今又有安培龙、宇立仪器等企业在人形机器人领域的加速布局,我认为国产力传感器的未来生态将变得更加繁荣。
参考来源:
安培龙官微
华源证券《安培龙——汽车压感国产替代,人形机器人力感新蓝海》
关注我们
 扫描二维码关注微信
扫描二维码关注微信


 手机站
手机站
