
随着人形机器人在服务、医疗、工业等领域的快速普及与发展,机械手所搭载的关节模组,其性能要求也日益严苛,尤其在运动范围、控制精度、集成度及结构紧凑性等关键维度上,面临着更高的挑战。当前,机器人关节模组主要分为旋转关节模组和直线关节模组两大类,这两种结构虽各有优势,但在实现复杂、精准的人体仿生动作方面,仍存在明显的局限。
旋转关节模组通常采用减速器(如行星减速器、谐波减速器等)与电机相结合的结构设计,能够提供较大的扭矩输出,可充分满足机器人手臂高负载、大力矩的作业需求。但该类模组存在一个显著短板:通常仅具备单一旋转自由度,即一个关节只能围绕一个固定轴进行旋转运动,难以提供理想的运动范围与控制精度,无法完美复刻人体关节的灵活转动特性。
直线关节模组则通过丝杠与电机的配合,将电机的旋转运动转化为线性伸缩运动,可用于模拟人体肌肉的伸缩动作,在空间利用率方面具备一定优势。然而,该类模组在多自由度运动实现上能力有限,无法有效模拟肩关节、髋关节等需要多个旋转自由度的球窝关节运动,即便在部分特定场景中表现出一定适用性,但其单一自由度的结构特性,使其在实现复杂三维运动时,难以提供精准、灵活的运动控制。
针对上述现有技术的不足,长盈精密近日公布了一篇名为“机器人关节模组”的新专利,以解决现有的关节模组自由度不足、集成度低的问题。

来源:《机器人关节模组》(刘明生等)
该机器人关节模组主要由第一关节驱动单元、第二关节驱动单元及关节输出单元三部分组成,通过四驱动部协同工作,实现类似人体肩关节、髋关节的三自由度球窝式姿态输出,兼顾结构紧凑性与运动精准性。
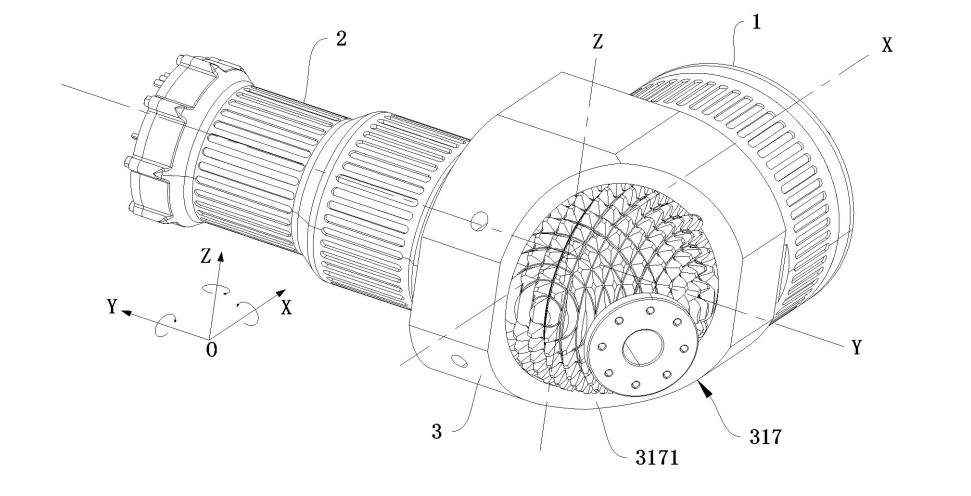
来源:《机器人关节模组》(刘明生等)
第一关节驱动单元沿X轴(第一方向)布置,核心是实现双动力集成输出。其包含第一拨叉结构、第一驱动部、第二驱动部、第一壳体总成及第一滚齿等部件。第一拨叉结构由第一基部和对称分布的两第一传递臂组成,为驱动部件提供安装支撑,同时通过合理的结构设计,将第一驱动部与第二驱动部分别集成于内外侧,实现径向高度集成。第一驱动部驱动第一拨叉结构绕X轴自转,第二驱动部则驱动第一滚齿绕Z轴(第二方向)自转,两者输出独立且互不干扰,通过第一滚齿将双轴动力传递至关节输出单元。第一壳体总成套装于驱动部件外周,既提供防护支撑,又通过轴承与弹簧结构,减少振动与装配误差,提升运行稳定性。
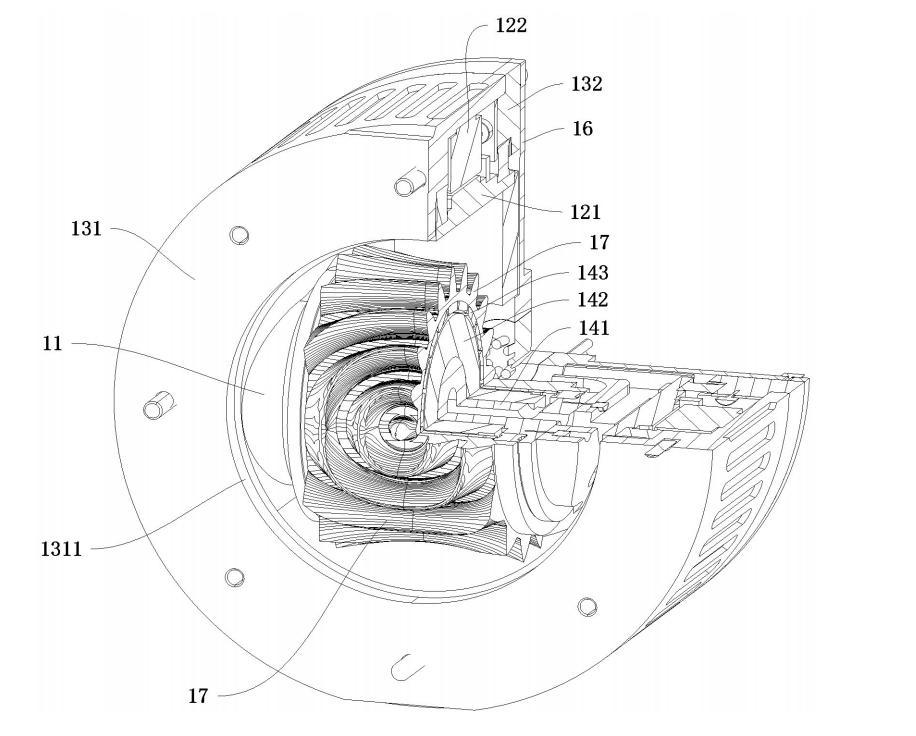
第一关节驱动单元的结构示意图 来源:《机器人关节模组》(刘明生等)
第二关节驱动单元沿Y轴(第三方向)布置,与第一关节驱动单元呈正交分布,第二关节驱动单元包括第二拨叉结构、连接在第二拨叉结构上的第二滚齿、连接在第二拨叉结构上并用于驱动第二拨叉结构绕第三方向自转输出的第三驱动部、连接于第二拨叉结构并用于驱动第二滚齿绕第四方向自转输出的第四驱动部以及套装在第二拨叉结构和第三驱动部上的第二壳体总成。
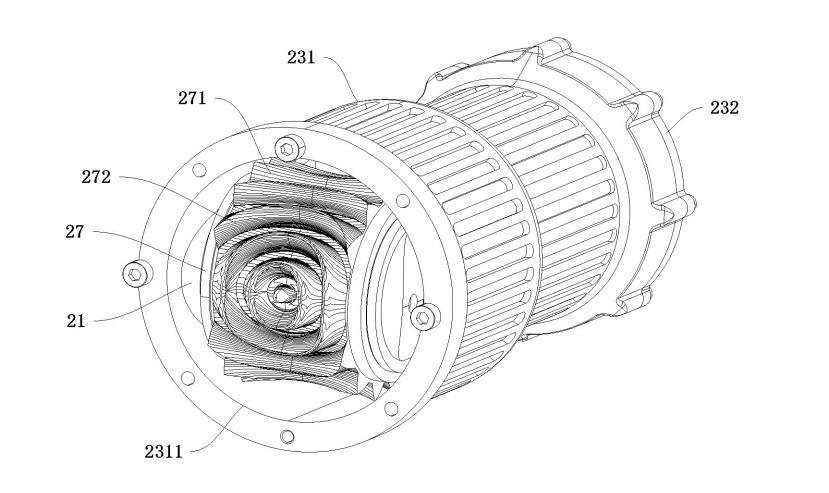
第二驱动单元结构示意图 来源:《机器人关节模组》(刘明生等)
关节输出单元是动力传递与姿态输出的终端,由第三壳体总成与球形齿组成。第三壳体总成内部设有球形腔,球形齿活动装配于腔内,仅可绕球心转动,实现三自由度姿态输出。球形齿表面布满啮合齿,且设有过渡齿带与第二环齿,分别与第一滚齿、第二滚齿的条形齿及第一环齿实现啮合、耦合与滑动配合,这是实现多自由度驱动的关键。过渡齿带的长齿设计的弧形导向面,可引导滚齿调整运动方向,避免驱动干涉,确保动力传递顺畅。球形齿的输出端设计为法兰轴,便于与外部机械臂等设备连接,实现运动输出。
该模组的工作核心的是四驱动部的协同控制与滚齿、球形齿的配合切换。初始状态下,第一滚齿与第二滚齿分别与球形齿的第二环齿配合,通过各驱动部的交替运行,带动滚齿绕不同轴自转,使条形齿与球形齿的啮合齿、过渡齿带交替实现啮合、耦合与滑动配合,最终驱动球形齿绕X、Y、Z轴转动,实现三维姿态输出。控制器通过接收目标姿态参数,基于逆运动学映射关系计算各驱动部目标角度,结合磁编码器的反馈信号,执行闭环同步控制,避免啮合冲击与抖动,提升姿态跟踪稳定性。
相较于传统关节模组,该产品具有显著优势,可实现高度集成化设计与三维姿态输出,其中第一关节驱动单元与第二关节驱动单元输出相互独立、互不干扰。二者可在不同方位进行驱动叠加与协同驱动,最终实现多自由度连续可控运动;通过协同配合,使各部件形成同步约束与协调联动,有效降低单一驱动率先动作引发的啮合冲击,保障多自由度姿态的稳定跟踪与精准控制。
参考来源:
刘明生.机器人关节模组
关注我们
 扫描二维码关注微信
扫描二维码关注微信


 手机站
手机站
